
※ソースに動画あり
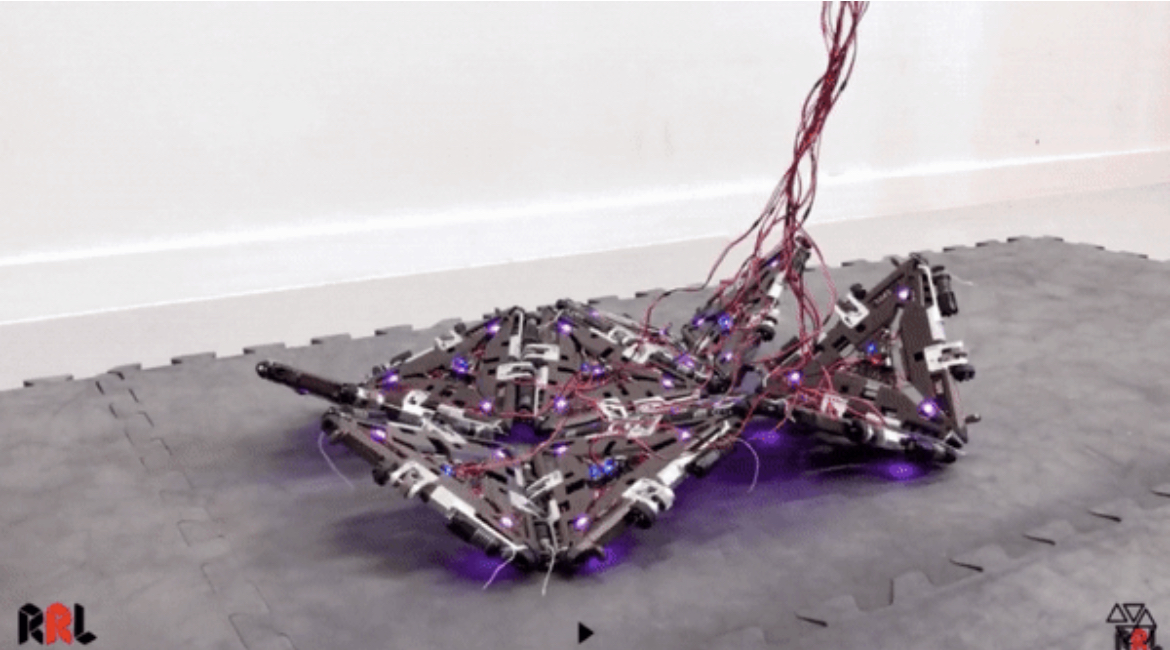
Mori3ロボットが立ち上がる様子。
宇宙ミッションに用途別のロボットを連れていこうにも、月や火星に向かうロケットの貨物室には何体も積載するゆとりはないかもしれません。
多目的に使えるモジュール式のロボットなら、そんな問題の解決策となりそうです。
スイス連邦工科大学ローザンヌ校(EPFL)のエンジニアのチームが設計したMori3は、三角形のモジュールからほとんどの3Dオブジェクトへと形を変えられるロボットです。
Nature Machine Intelligenceに掲載された論文によれば、各モジュールがくっ付いてさまざまな形を構築するポリゴンメッシングと呼ばれるプロセスを通し、
あらゆるタスクを果たすという発想なんだそう。
研究者たちはMori3が、月面やいずれは火星のコロニーにいる宇宙飛行士たちをアシストできる日が来ると考えています。
「Mori3は目の前の環境とタスクに応じて自由自在に組み立て・分解できる、モジュール型の折り紙のようなロボットを作り出すことを目的としています」
と、Reconfigurable Robotics LabのJamie Paik所長はリリースの中で語っていました。
そして「Mori3は大きさ、形状、機能を変えられます」ともコメントしています。
■複雑なタスクの遂行は難しいかも…
Mori3ロボットは自律型の部品で構成されているので、形を変えて別のモジュールにくっ付き、機能的な構造を作るためにやりとりできるんだそう。
また互いに連結すると、群れとして行動します。
意図された形へと合体した後のロボットは動き回り、物体に触れて運び、ユーザーと交流することができました。
前述のリリースの中で、「ロボット工学への理解を再考する必要がありました」と語っていたのはロボット工学の博士研究員Christoph Belke氏。
「ポリゴンメッシングが有望なロボット戦略だと示せたのです」と述べていました。
Mori3ロボットは宇宙船に収容できるよう、そして形状に合わせた基本的なアクティビティを実行できるよう設計されていますが、
複雑なタスクを遂行するようには設計されていません。
「連結式構造を作るために互いに接続する多角形で多態形なロボットは幅広い用途に効果的に使えます」とリリースの中でコメントしていたPaik所長も、
「Mori3のような多目的なロボットは、特定の分野においては特化したロボットよりも効果的でなくなるでしょう」と指摘。
しかし「Mori3の最大のセールスポイントは多用途性です」と強調していました。
画像
引用元: ・【合体ロボ】宇宙船の省スペース化に貢献? 合体して形を変えるロボット [ごまカンパチ★]
ゴライオン?ゴッドシグマ?
ドラえもんレベルのロボットは
作られるの?







